CppCon 2025 Lazy and Fast: Ranges Meet Parallelism in C++ -- Daniel Anderson
 Registration is now open for CppCon 2026! The conference starts on September 12 and will be held in person in Aurora, CO. To whet your appetite for this year’s conference, we’re posting videos of some of the top-rated talks from last year's conference. Here’s another CppCon talk video we hope you will enjoy – and why not register today for CppCon 2026!
Registration is now open for CppCon 2026! The conference starts on September 12 and will be held in person in Aurora, CO. To whet your appetite for this year’s conference, we’re posting videos of some of the top-rated talks from last year's conference. Here’s another CppCon talk video we hope you will enjoy – and why not register today for CppCon 2026!
Lazy and Fast: Ranges Meet Parallelism in C++
by Daniel Anderson
Summary of the talk:
Recent advances in the C++ standard have introduced powerful features like ranges and parallel algorithms—both aimed at writing faster, cleaner, and more expressive code. Ranges offer lazy, on-demand computation that improves I/O efficiency and composability. Parallel algorithms, on the other hand, harness multitasking to speed up compute-heavy workloads.
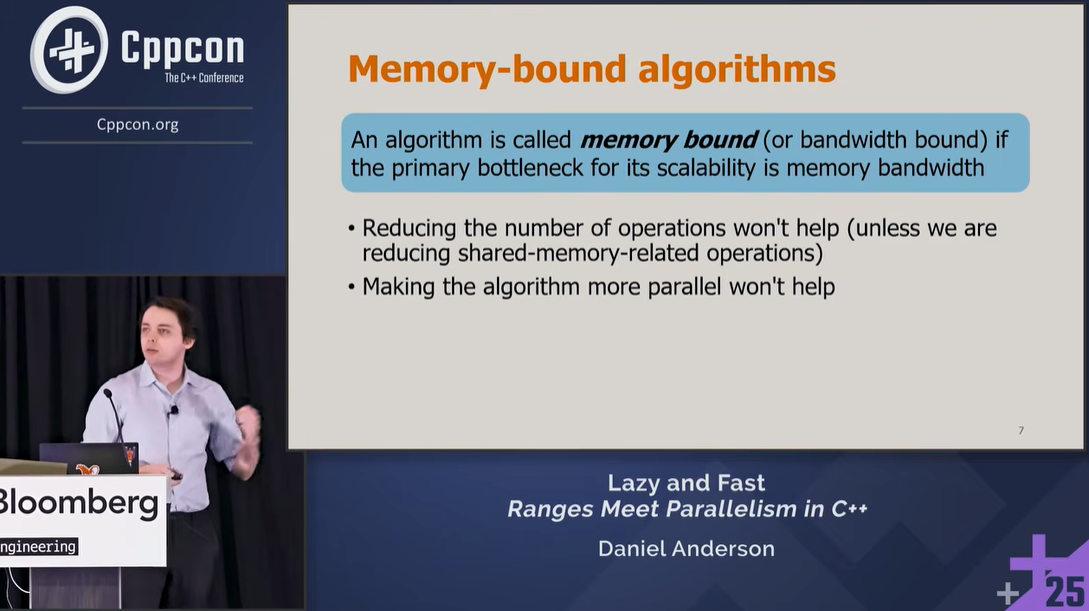
At first glance, these two features seem like a perfect match: lazy evaluation to minimize I/O overhead, and parallelism to maximize throughput. However, in practice, they don’t play well together. Many range operations—especially those over non-random-access sources—are inherently sequential due to their lazy pull-based, one-element-at-a-time nature.
In this talk, we’ll explore a modern library technique that unlocks the synergy between lazy ranges and parallelism. You’ll see how to build lazy, composable range pipelines that are parallel-friendly—capable of efficiently expressing operations like filter, scan, and flatten without sacrificing performance or elegance. We’ll walk through real-world examples where these techniques deliver strong parallel speedups with minimal programming overhead.
Whether you’re a library designer, performance enthusiast, or just curious about making your range-based code scale, this talk will equip you with practical tools to bridge the gap between composability and parallelism in modern C++.
 Let’s continue our exploration of C++26 improvements. Today we focus on
Let’s continue our exploration of C++26 improvements. Today we focus on  Registration is now open for CppCon 2026! The conference starts on September 12 and will be held
Registration is now open for CppCon 2026! The conference starts on September 12 and will be held  GCC 16 is about to be released, so I'm sharing some of the new features I worked on this year. Some changes are visible to users, while others improve the system more subtly.
GCC 16 is about to be released, so I'm sharing some of the new features I worked on this year. Some changes are visible to users, while others improve the system more subtly. Registration is now open for CppCon 2026! The conference starts on September 12 and will be held
Registration is now open for CppCon 2026! The conference starts on September 12 and will be held  Registration is now open for CppCon 2026! The conference starts on September 12 and will be held
Registration is now open for CppCon 2026! The conference starts on September 12 and will be held  Registration is now open for CppCon 2026! The conference starts on September 12 and will be held
Registration is now open for CppCon 2026! The conference starts on September 12 and will be held